Terminology & Notation
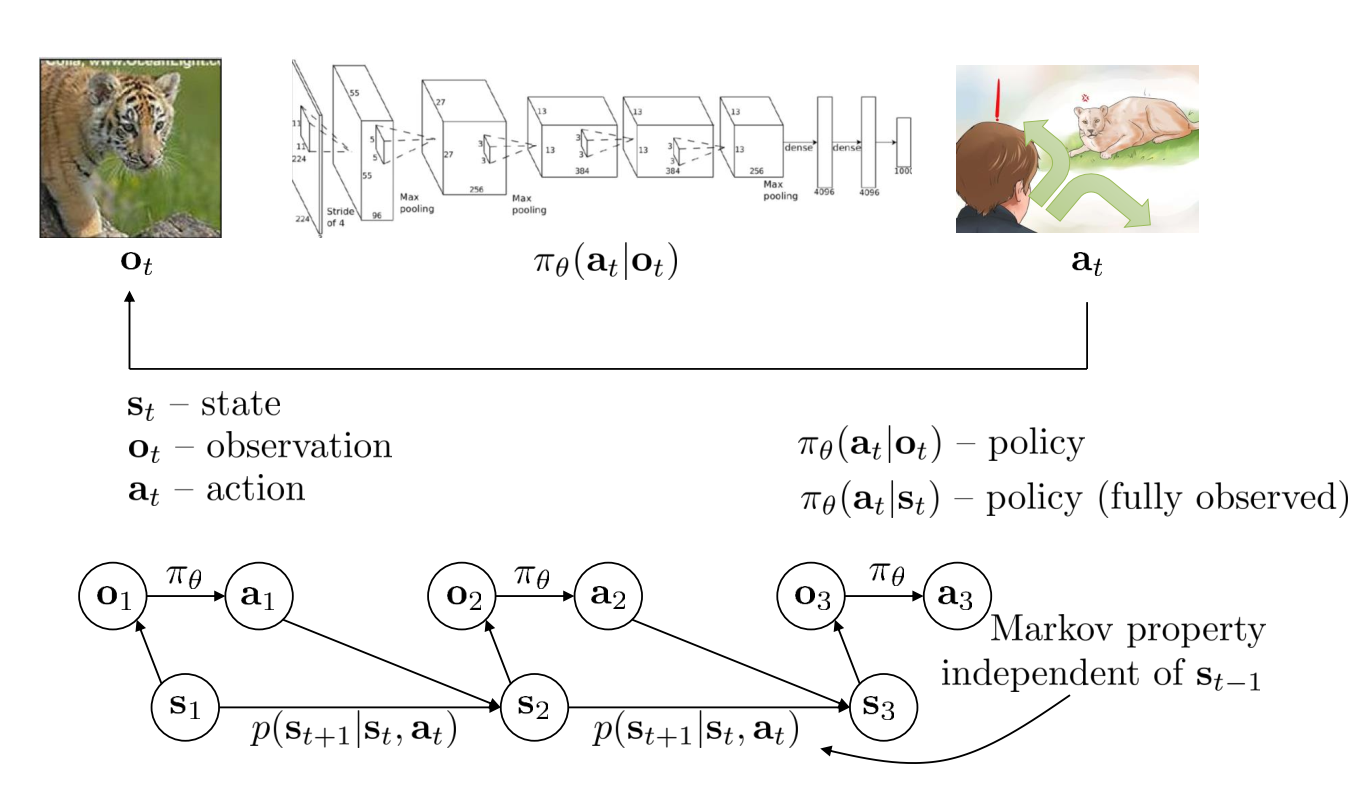
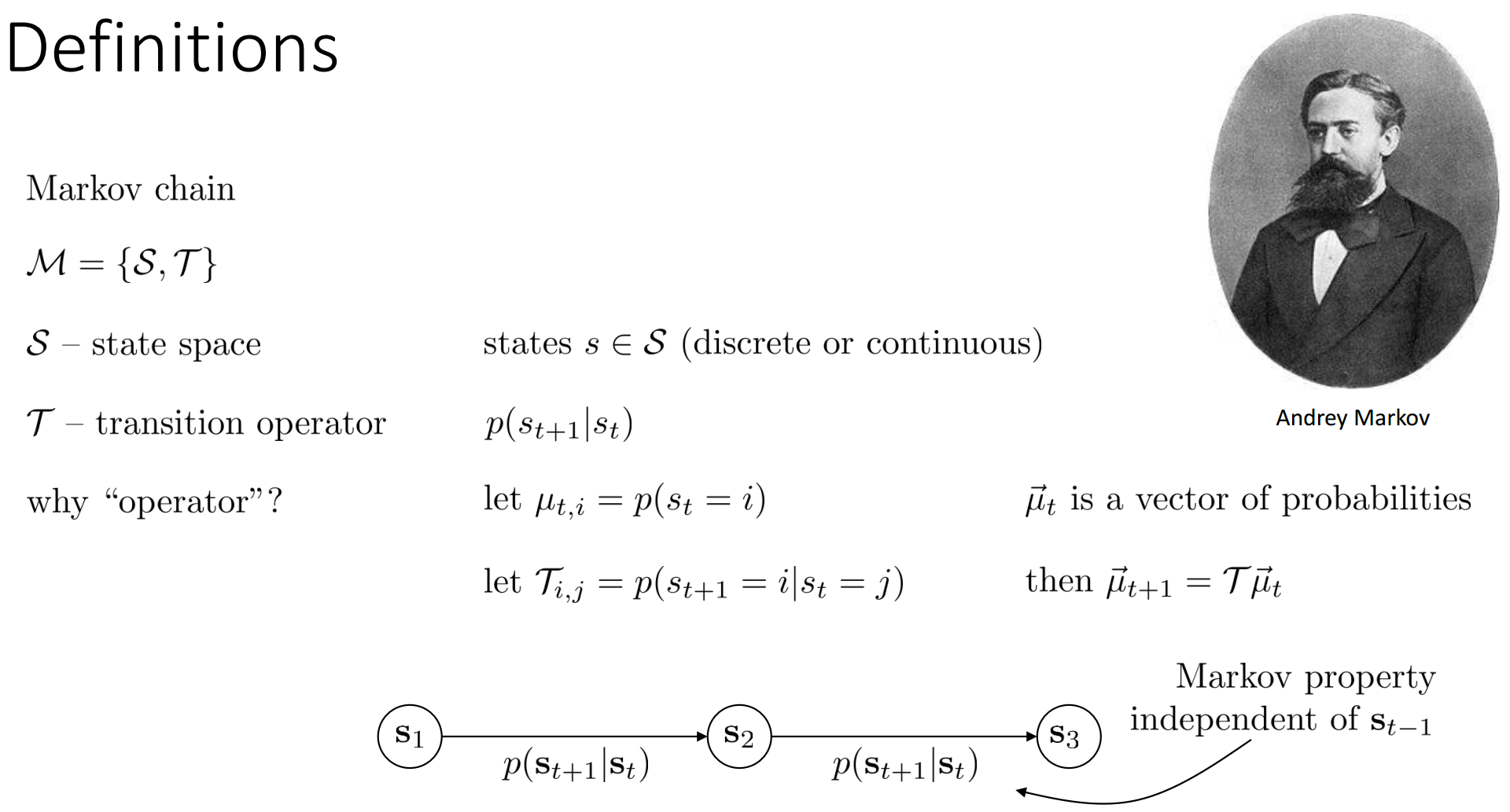
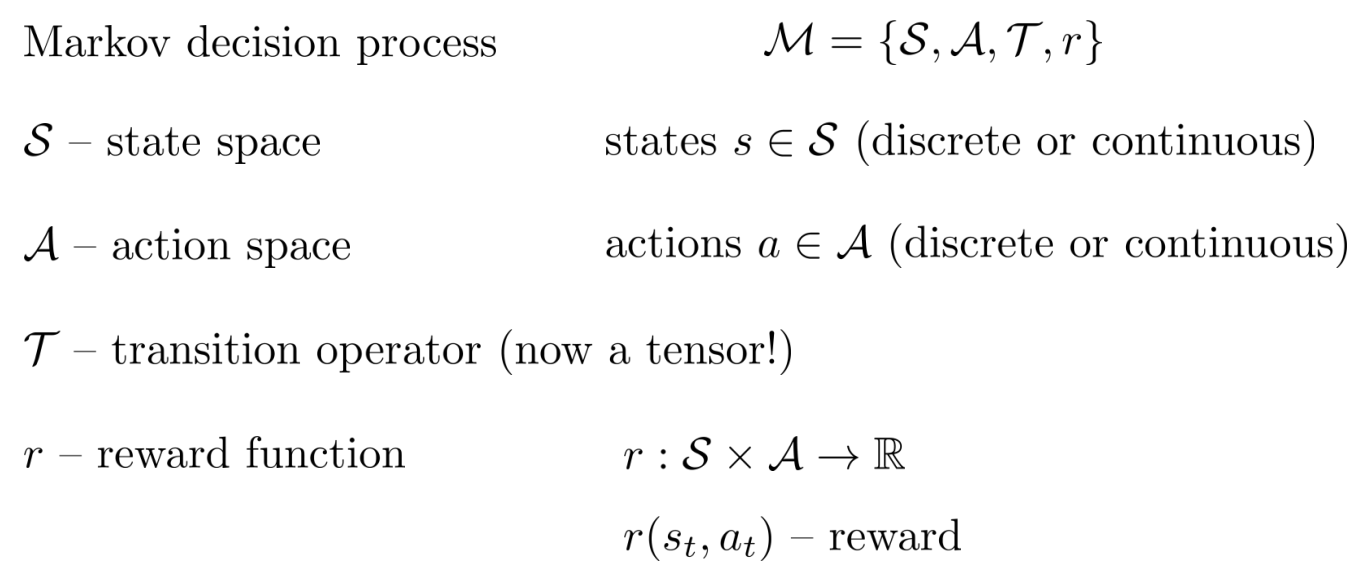
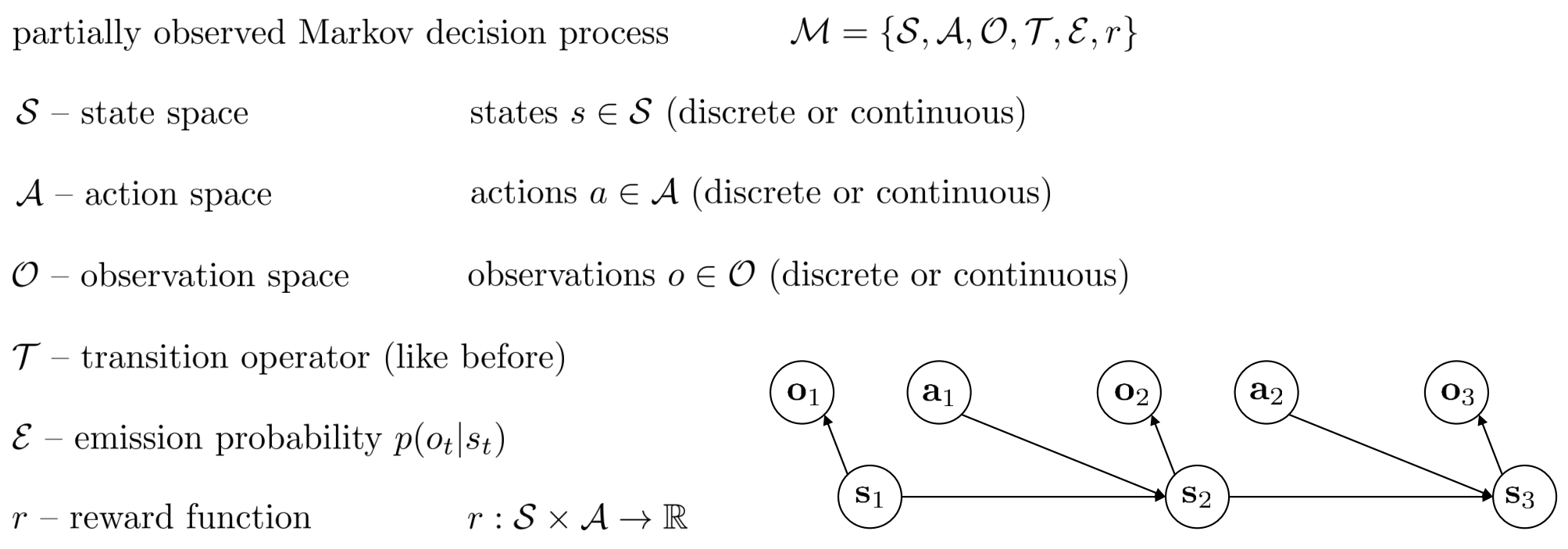
Definitions
MDP
POMDP
The Goal of Reinforcement Learning
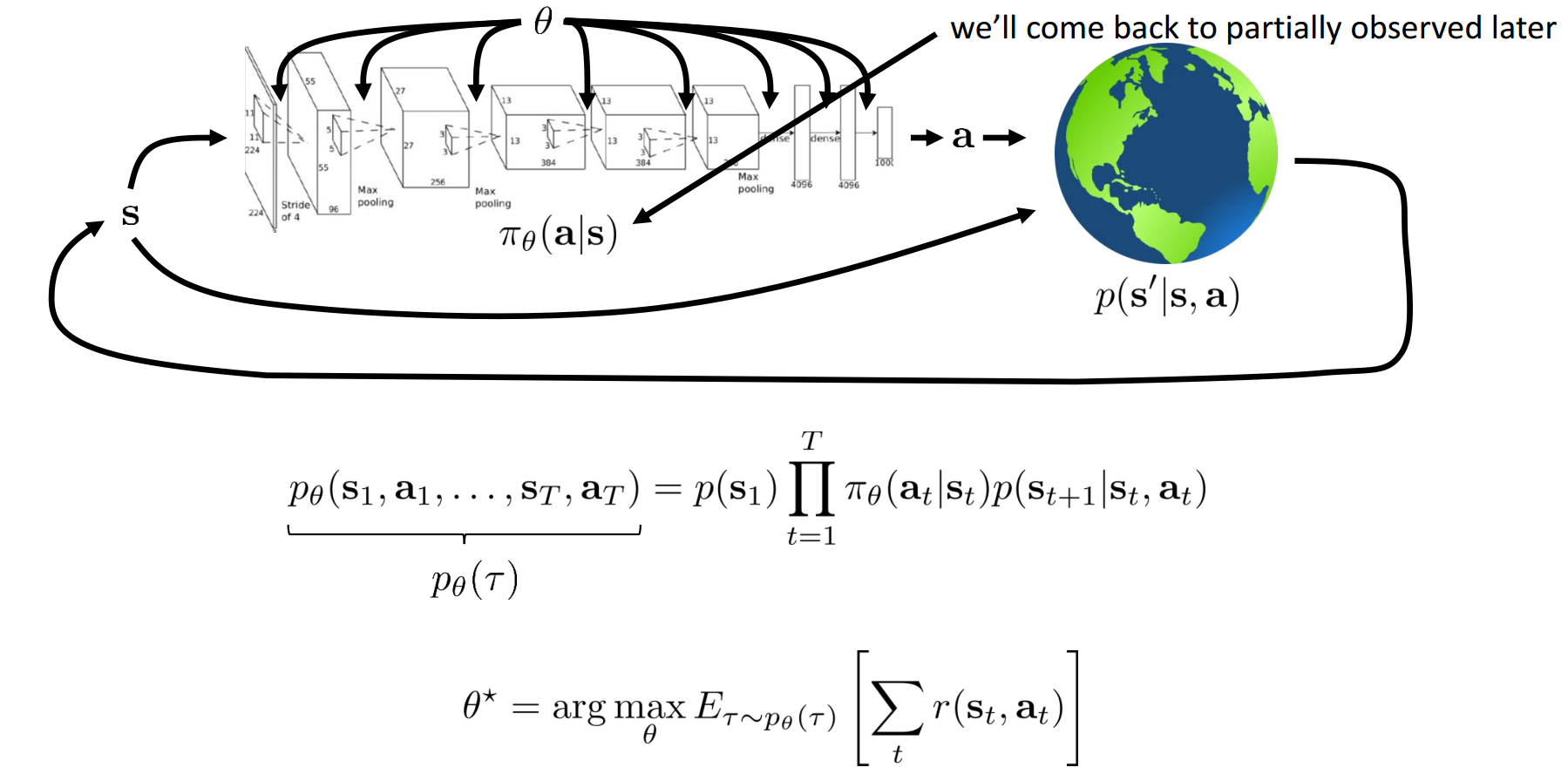
Markov chain on :
Finite Horizon Case: State-action Marginal
is state-action marginal.
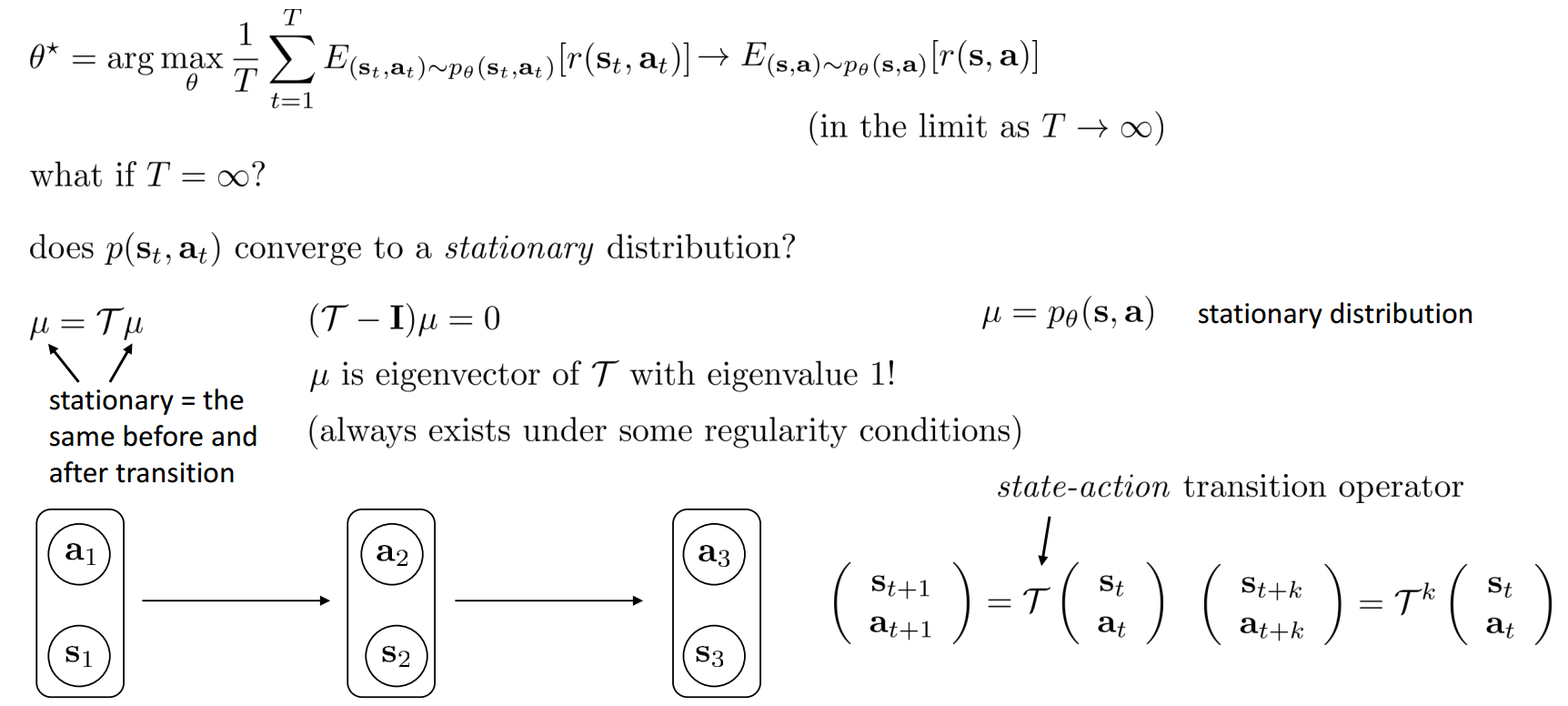
Infinite Horizon Case: Stationary Distribution
Expectations and Stochastic Systems
For infinite horizon case:
For finite horizon case:
In RL, we almost always care about expectations.
- -> not smooth
- -> smooth in !
RL Algorithms
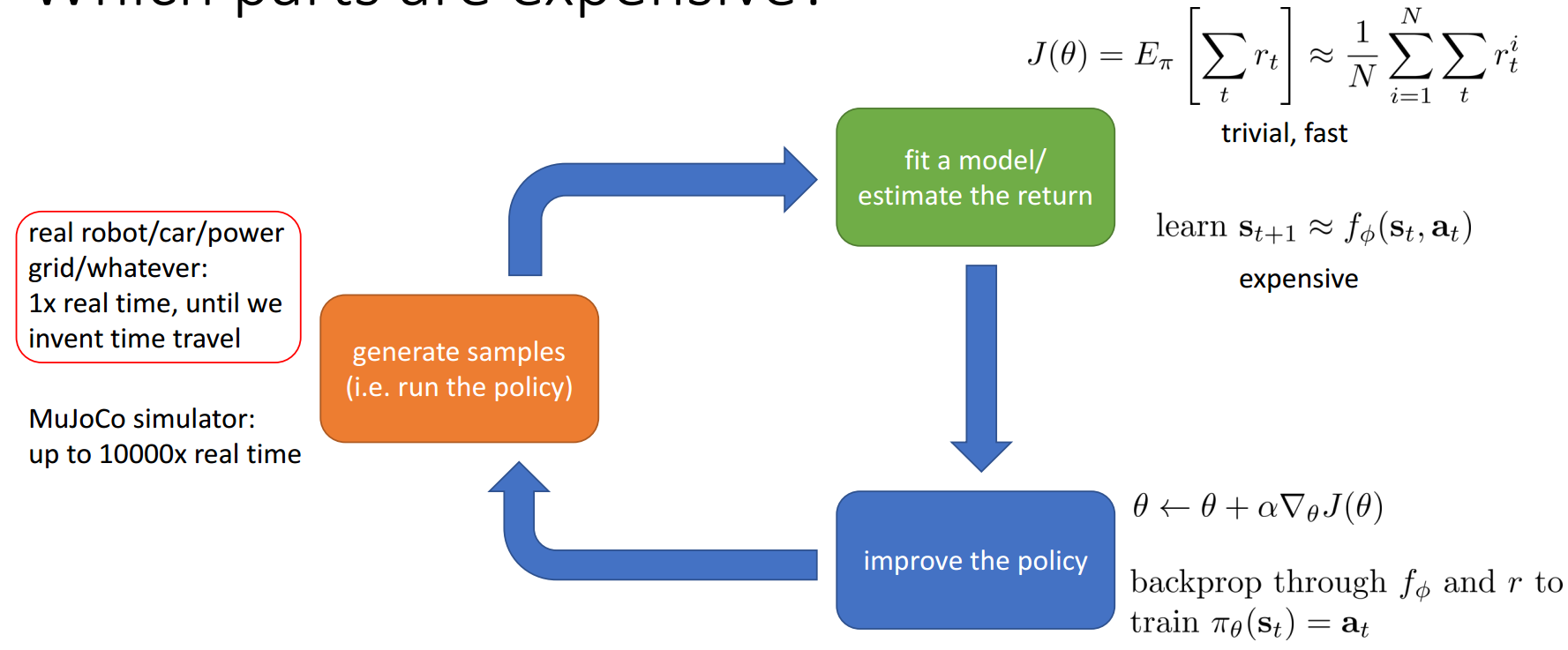
Structure of RL Algorithms
- Sample generation
- Fitting a model/estimating return
- Policy improvement
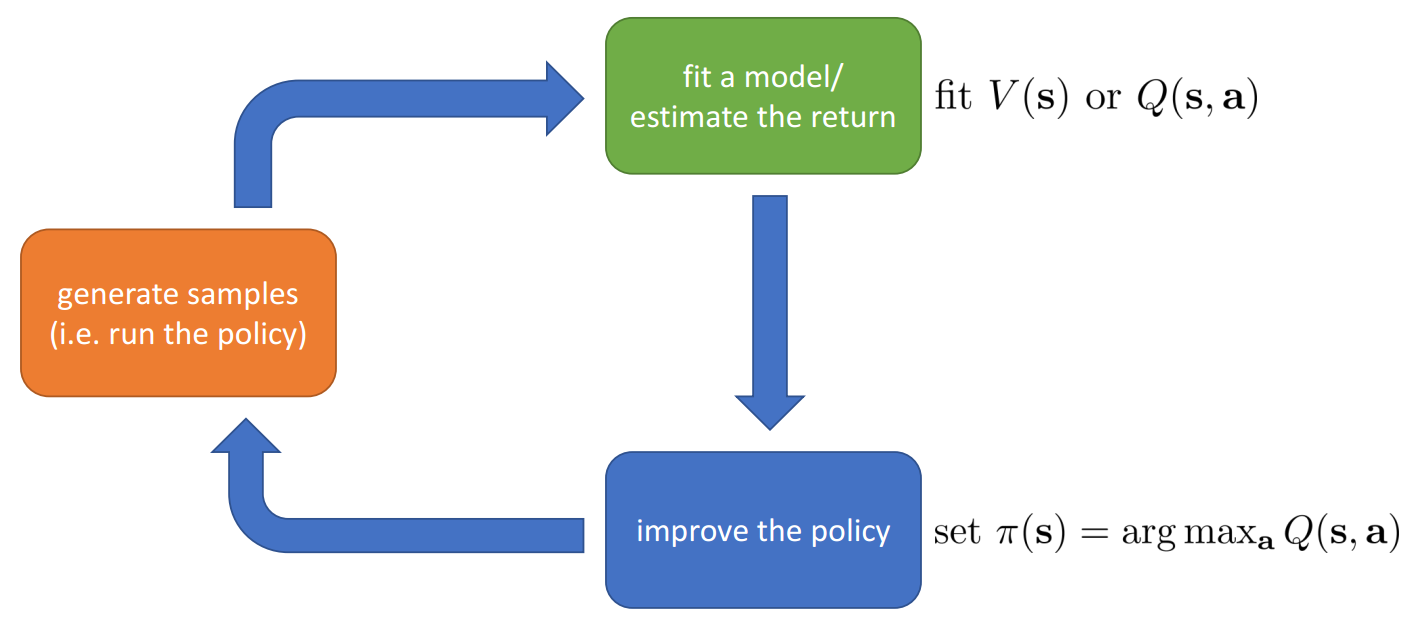
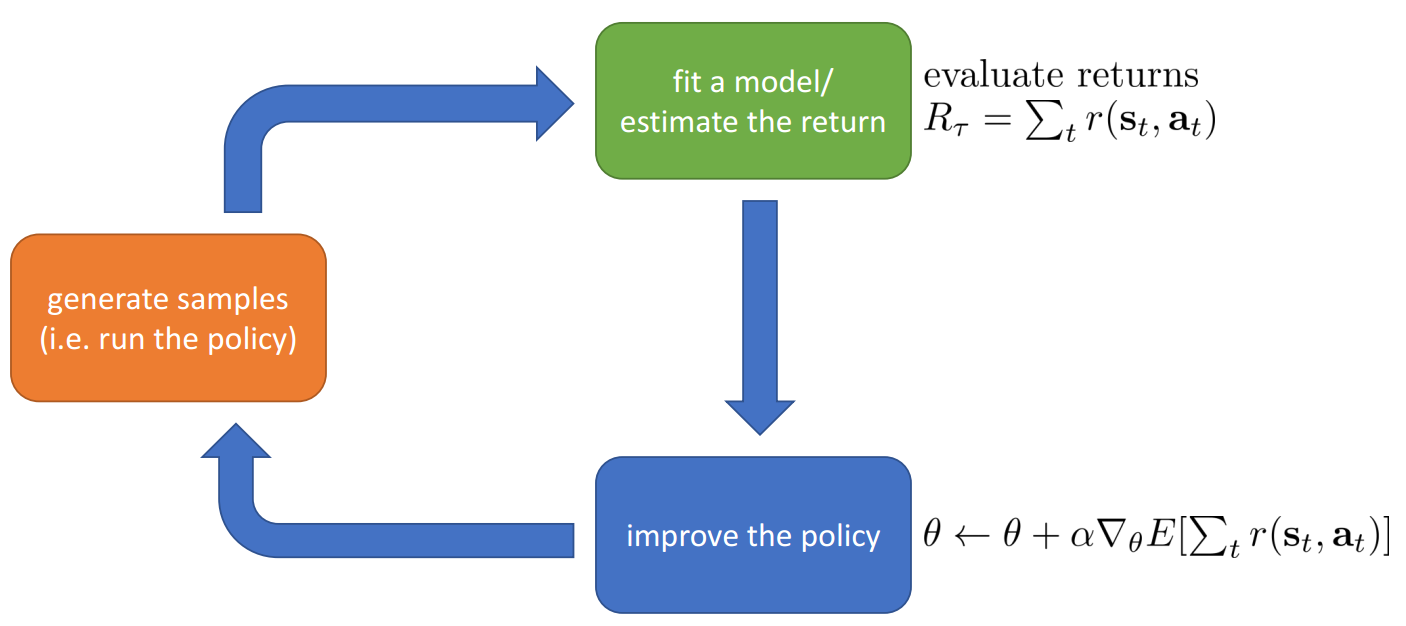
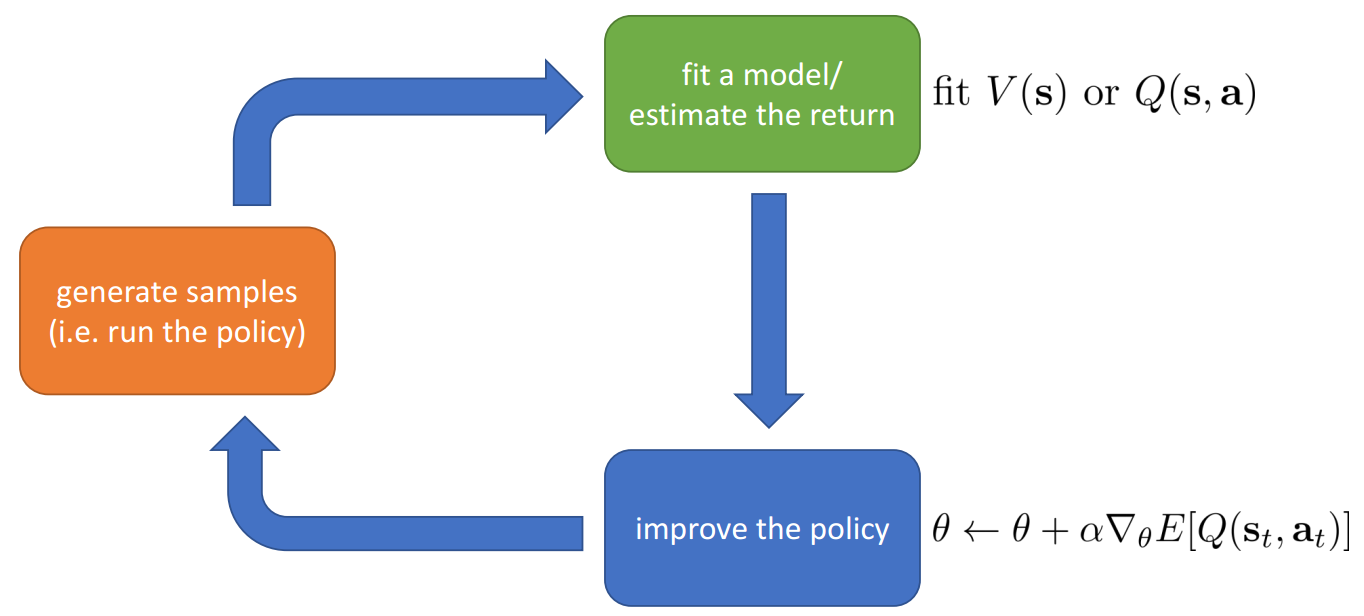
The Anatomy of a RL Algorithm
Q-Function
Q-function is the total reward from taking in :
Value-Function
Value-function is the total reward from :
is the RL objective!
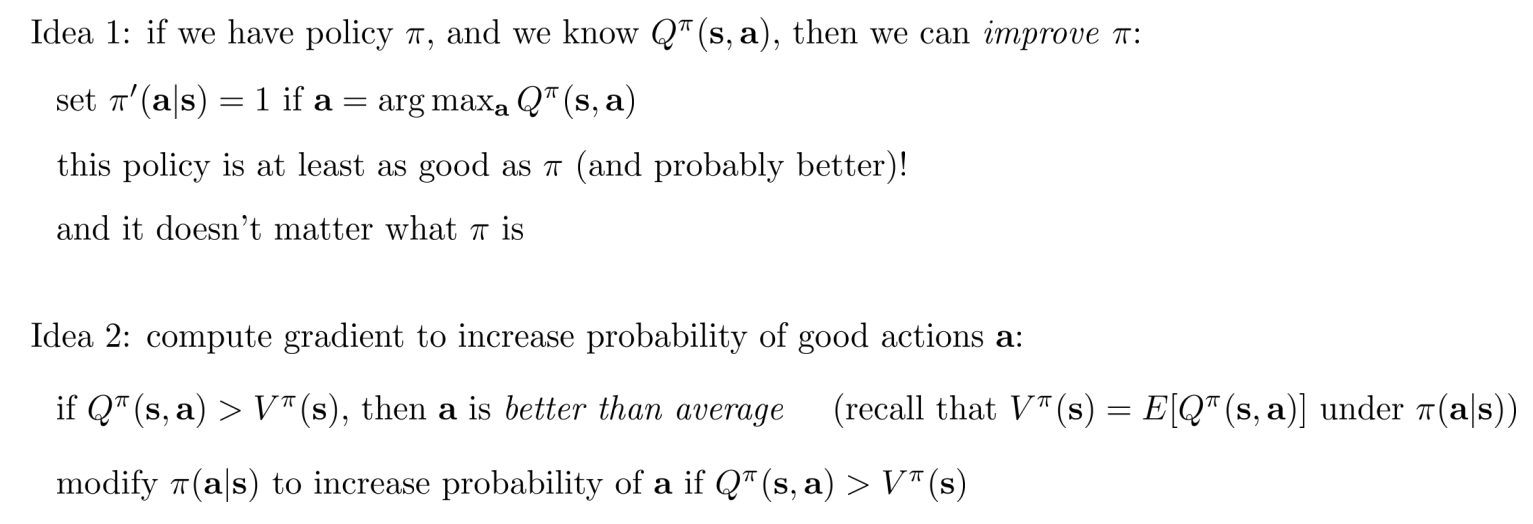
Using Q-Function and Valuer Functions
Types fo RL Algorithms
The goal of RL:
- Policy gradients: directly differentiate the above objective
- Value-based: estimate value function or Q-function of the optimal policy (no explicit policy)
- Actor-critic: estimate value function or Q-function of the current policy, use it to improve policy
- Model-based RL: estimate the transition model, then improve the policy
Model-based RL
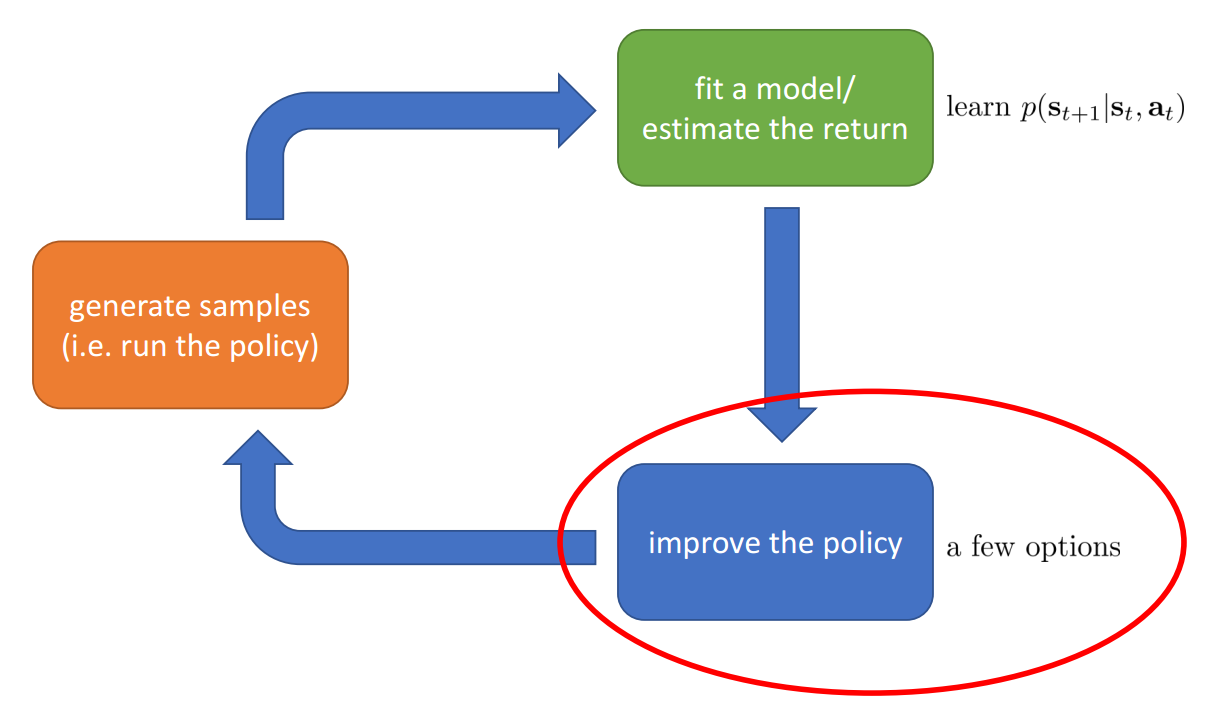
Estimate the transition model, then improve the policy by:
- Just use the model to plan (no policy)
- Trajectory optimization/optimal control (primarily in continuous spaces) – essentially back-propagation to optimize over actions
- Discrete planning in discrete action spaces – e.g., Monte Carlo tree search
- Back-propagate gradients into the policy
- Requires some tricks to make it work
- Use the model to learn a value function
- Dynamic programming
- Generate simulated experience for model-free learner
Value-Function based RL
Direct Policy Gradients
Actor-Critic: Value Functions + Policy Gradients
Why So Many RL Algorithms
- Different tradeoffs
- Sample efficiency
- Stability & ease of use
- Different assumptions
- Stochastic or deterministic?
- Continuous or discrete?
- Episodic or infinite horizon?
- Different things are easy or hard in different settings
- Easier to represent the policy?
- Easier to represent the model?
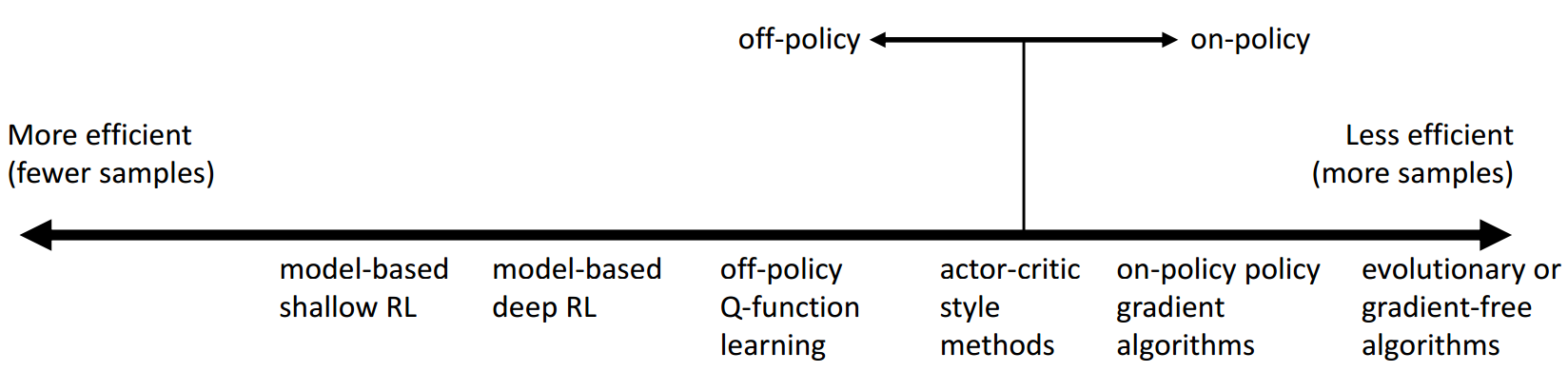
Comparison: Sample Efficiency
Sample efficiency: how many samples do we need to get a good policy?
Most important question: is the algorithm off policy?
- Off policy: able to improve the policy without generating new samples from that policy
- On policy: each time the policy is changed, even a little bit, we need to generate new samples
Comparison: Stability and Ease of Use
Question:
- Does it converge?
- And if it converges, to what?
And does it converge every time?
Supervised learning: almost always gradient descent
Reinforcement learning: often not gradient descent
- Q-learning: fixed point iteration
- At best, minimizes error of fit (“Bellman error”)
- Not the same as expected reward
- At worst, doesn’t optimize anything
- Many popular deep RL value fitting algorithms are not guaranteed to converge to anything in the nonlinear case
- At best, minimizes error of fit (“Bellman error”)
- Model-based RL: model is not optimized for expected reward
- Model minimizes error of fit
- This will converge
- No guarantee that better model = better policy
- Policy gradient
- The only one that actually performs gradient descent(ascent) on the true objective, but also often the least efficient!
- Q-learning: fixed point iteration
Comparison: Assumptions
- Common assumption #1: full observability
- Generally assumed by value function fitting methods
- Can be mitigated by adding recurrence
- Common assumption #2: episodic learning
- Often assumed by pure policy gradient methods
- Assumed by some model-based RL methods
- Common assumption #3: continuity or smoothness
- Assumed by some continuous value function learning methods
- Often assumed by some model-based RL methods
Examples of Specific Algorithms
- Value function fitting methods
- Q-learning, DQN
- Temporal difference learning
- Fitted value iteration
- Policy gradient methods
- REINFORCE
- Natural policy gradient
- Trust region policy optimization
- Actor-critic algorithms
- Asynchronous advantage actor-critic (A3C)
- Soft actor-critic (SAC)
- Model-based RL algorithms
- Dyna
- Guided policy search
Note: Cover Picture